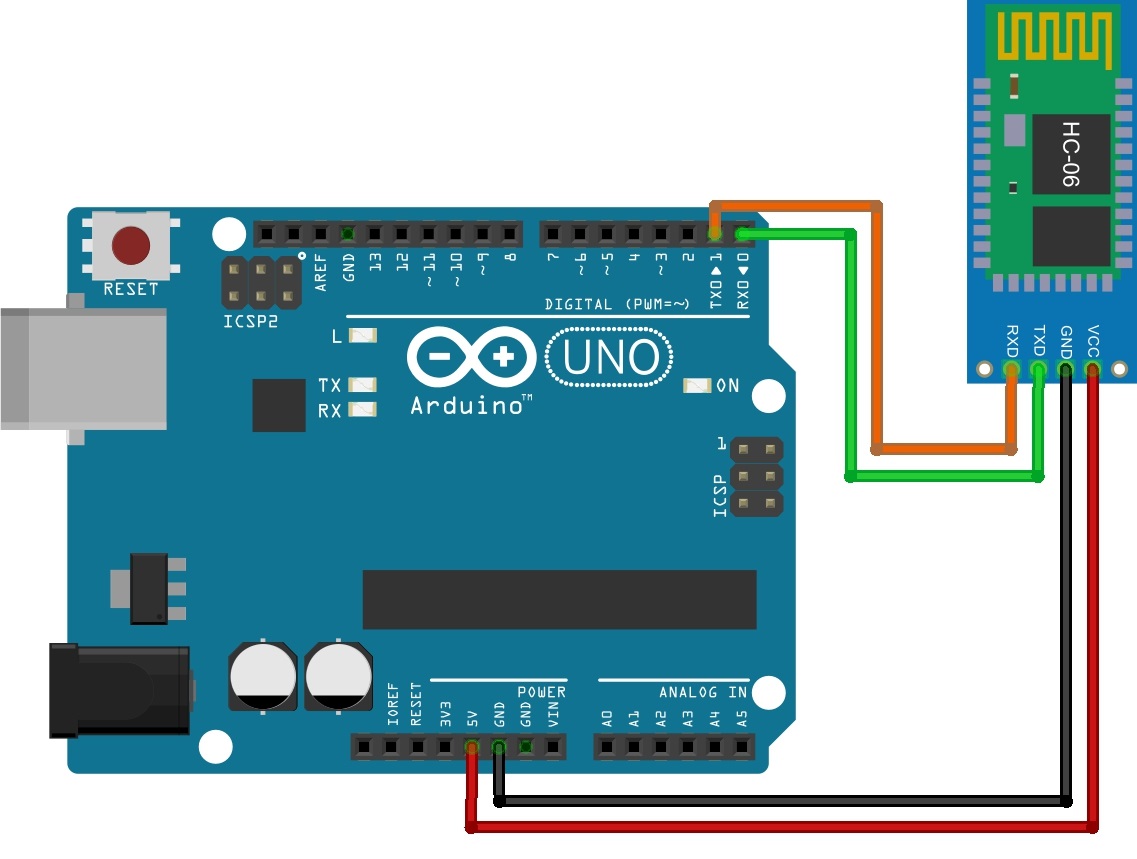
El pasado 02/08/2018, trabajamos actividades de inicio del tercer parcial, en la sección pagina del blog, añadimos un nuevo enlace de vizualizacion del nuevo archivo, que es "Creación", los pasos que seguimos para hacer esto: publicamos el archivo de creación en drive y en la parte de Incrustar, copiamos ese link que se muestra y lo pegamos en la parte de html del bloc, para poder poder el tamaño adecuado al inicio de lo que pegamos debe decir iframe, pues a su lado pusimos los valores de height="600" widht="600". Después comenzamos a crear un archivo en excel de drive, en el cual elaboramos una parte del cuadro de gantt, que nos dará apoyo a la hora de organizar nuestros tiempos para la correcta fabricación de la maqueta. Ya en la segunda hora, empezamos a hacer circuitos electrónicos usando una protoboard, leds, resistencias, foto-resistencias y un micro-controlador arduino. Siguiendo el modelo de la siguiente imagen sin el servomotor, conectamos los componentes y entramos a arduino para crear un código.

Pusimos el pin A0 como entrada que reciba la información proporcionada por el ldr(cambios de luminosidad). Configuramos los baudios para la recepción y transmisión de la información de la placa arduino con el ordenador, 9600 es una velocidad estándar receptada por muchas computadoras.
Y en void loop, colocamos que se pueda leer los números que nos envía el ldr al arduino por medio de Monitor serie.
Codigo:
void setup() {
// put your setup code here, to run once:
pinMode(A0, INPUT);// PIN A0 COMO ENTRADA
Serial.begin(9600);//
}
void loop() {
// put your main code here, to run repeatedly:
Serial.println(analogRead(A0));// mostrar valores del pin A0
}
Bibliográfica:
Arduino Playground (2018) Serial. Recuperado el 06 de del 2018 en: https://playground.arduino.cc/ArduinoNotebookTraduccion/Serial
Continuación:
El 13/08/2018 avanzamos en la primera hora clase en mecánica, donde ya con el poco tiempo pegamos la gran mayoría de paredes con silicona caliente, avanzando ya con el modelo el cual servirá de base para los componentes electrónicos. En la segunda hora seguimos con la practica anterior, configuramos el código y le añadimos más comandos para que este puede detectar el servomotor y la presencia del LDR. Para añadir el servomotor entramos a Archivo, ejemplos, servo, Sweep. Aperician unos comandos ya hechos por otras personas en el cual tomamos algunas partes para poder configurar nuestro servo como:
1)#include <Servo.h>
2) myservo.attach(9)}
3)myservo.write(180);
Codigo completo:
#include <Servo.h>
Servo myservo;
int foto;// declaracion de la variable llamada foto
int led=2;// declaracion de variable entera para almacenar el
//pin del led
void setup() {
// put your setup code here, to run once:
pinMode(A0, INPUT);// PIN A0 COMO ENTRADA
pinMode(led,OUTPUT);//PIN 2 como salida
myservo.attach(3); // Servomotor conectado al pin 3
Serial.begin(9600);// Para vizualizar en la pantalla los valores
myservo.write(0); // Inicia con el servotor apagado
}
void loop() {
foto=analogRead(A0);//asignando a la variable el valor que lee
Serial.println(foto); // se mostrara los valores del LDR en Monitor serial
if(foto>500) // si el LDR envia una cantidad menor que 500 se apagara
{
digitalWrite(led,LOW);//apagar led
myservo.write(90); // el servomotor girara en 90°
}
else // le dice al arduino que si la condicion primera no se cumple haga otra
{
digitalWrite(led,HIGH);//encender led
myservo.write(180); // el servomotor se movera en 180°
}
}